KAPDEC® | Elite STEM Learning Platform | https://kapdec.com
Unit: Functions involves Parameters, Vectors & Matrices
Chapter: Transformational Matrix on a graphical object
Reference: – Matrix and their types, Addition of matrix, Subtraction of matrix, Multiplication of matrix, Properties of scalar multiplication, Transpose of a matrix, Elementary Operation of a matrix, Invertible matrices.
After studying this chapter, you should be able to:
- Introduction to Transformational Matrices and their types.
- Properties of Matrix and Their graphical solution
- Elementary Operation and Invertible matrices.
- Transpose of matrix, Applications & Properties.
Introduction to Transformational Matrix
Matrices: Matrix and Types of Matrices
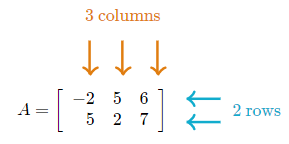
Matrix is an arrangement of numbers into rows and columns.
A matrix is a rectangular arrangement of numbers into rows and columns.
For example, matrix A has two rows and three columns.
Source: Kapdec.com
Definition: A matrix is an ordered rectangular array of numbers or functions. The numbers or functions are called the elements or the entries of the matrix.
We generally denote matrices by capital letters. The following are some examples of matrices:
In the above examples, the horizontal lines of elements are said to constitute rows of the matrix and the vertical lines of elements are said to constitute columns of the matrix. Thus, A has 3 rows and 2 columns, B has 3 rows and 3 columns, while C has 2 rows and 3 columns.
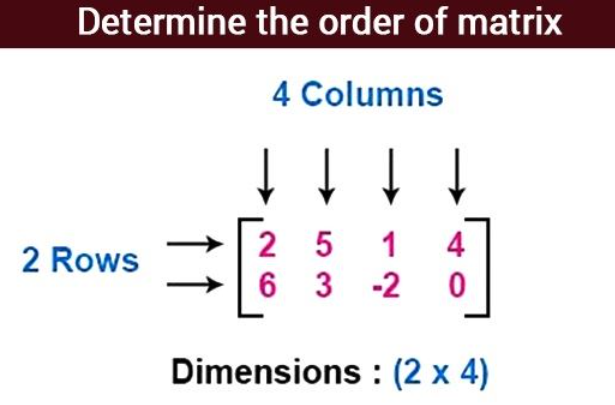
Order of a matrix
The dimensions of a matrix tells its size: the number of rows and columns of the matrix, in that order.
A matrix having m rows and n columns is called a matrix of order m × n or simply m × n matrix (read as an m by n matrix). So referring to the above examples of matrices, we have A as 3 × 2 matrix, B as 3 × 3 matrix and C as 2 × 3 matrix. We observe that A has 3 × 2 = 6 elements, B and C have 9 and 6 elements, respectively.
Example:
Source: Kapdec.com
Clearly, a matrix of the order m × n has mn elements. Hence, if the number of elements in a matrix be prime, it must have one row or one column.
Usually, a matrix is denoted by a capital letter, such as A, B, C, D, M, N, X, Y, Z, etc.
In general, an m × n matrix has the following rectangular array:
Thus the ith row consists of the elements ai1, ai2, ai3, …, ain, while the
jth column consists of the elements a1j, a2j, a3j, …, amj ,
In general, aij is an element lying in the ith row and jth column. We can also call it as the (i, j)th element of A. The number of elements in an
m × n matrix will be equal to mn.
Source: Kapdec.com
Note: Any point (x, y) in a plane can be represented by a matrix (column or row) as xy
Source: Kapdec.com
(or [x, y]).
For example, point P(0, 1) as a matrix representation may be given as
P = 01
Source: Kapdec.com
or [0 1]
So, we can express the vertices of a closed rectilinear figure in the form of a matrix.
For example:
Let us assume a quadrilateral ABCD with vertices A (2, 1), B (5, 2), C (6, 9), D (–5, 8)
Thus, matrices can be used as representation of vertices of geometrical figures in a plane.
Solved Examples on Order of a Matrix:
1.
Source: Kapdec.com
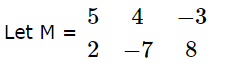
What is the order of the matrix M?
Solution:
The order of the matrix A is 2 × 3 because there are 2 rows and 3 columns in the matrix.
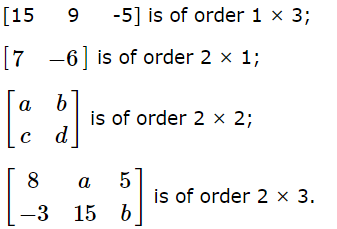
2. If a matrix has six elements, find the possible orders of the matrix.
Solution:
6 = 1 × 6;
6 = 6 × 1;
6 = 2 × 3;
6 = 3 × 2
Therefore, the possible orders of the matrix are 6 = 1 × 6, 6 × 1, 2 × 3 and 3 × 2.
3. If a matrix has 18 elements, what are the possible orders it can have?
Solution:
Number of entries = (Number of rows) x (Number of columns) = 18
If order is (a x b) then, Number of entries = a x b
So now a x b = 18 (in this case)
Possible cases are (1 x 18), (2 x 9), (3 x 6), (6 x 3), (9 x 2), (18 x 1)
Conclusion: If a matrix has 18 elements, then possible orders are (1 x 18), (2 x 9), (3 x 6), (6 x 3), (9 x 2), (18 x 1)
Matrices: Elementary Operation (Transformation) of a Matrix and Invertible Matrices
Source: Kapdec.com
There are six operations (transformations) on a matrix, three of which are due to rows and three due to columns, which are known as elementary operations or transformations.
(i) The interchange of any two rows or two columns. Symbolically the interchange of ith and jth rows is denoted by Ri « Rj and the interchange of ith and jth column is denoted by Ci « Cj.
For example, applying R1 « R2 to A = 121-131 567
Source: Kapdec.com
, we get -131121567
Source: Kapdec.com
.
(ii) The multiplication of the elements of any row or column by a non zero number. Symbolically, the multiplication of each element of the ith row by k, where k ≠ 0 is denoted by Ri → kRi.
The corresponding column operation is denoted by Ci ® kCi
For example, applying C3 ® 17
Source: Kapdec.com
C3, to B = 121-131
Source: Kapdec.com
, we get 1217-1317
Source: Kapdec.com
(iii) The addition to the elements of any row or column, the corresponding elements of any other row or column multiplied by any non zero number. Symbolically, the addition to the elements of ith row, the corresponding elements of jth row multiplied by k is denoted by Ri ® Ri + kRj.
The corresponding column operation is denoted by Ci ® Ci + kCj.
For example, applying R2 ® R2 – 2R1, to C = 1 22-1
Source: Kapdec.com
, we get 1 20-5
Source: Kapdec.com
.
Invertible Matrices
Definition: A square matrix A of dimension n x n is called invertible if and only if there exists another matrix B of the same dimension, such that AB = BA = I, where I is the identity matrix of the same order. Matrix B is known as the inverse of matrix A. Inverse of matrix A is symbolically represented by A-1. Invertible matrix is also known as a non-singular matrix or non-degenerate matrix.
For example:
Let A = 1325
Source: Kapdec.com
and B = 5-2-21
Source: Kapdec.com
be two matrices.
AB = 13255-2-21
Source: Kapdec.com
=1001
Source: Kapdec.com
= I
Also, BA = 1001
Source: Kapdec.com
= I.
Thus B is the inverse of A, in other words B = A–1 and A is inverse of B, i.e., A = B–1
Note:
1. A rectangular matrix does not possess inverse matrix, since for products BA and AB to be defined and to be equal, it is necessary that matrices A and B should be square matrices of the same
order.
2. If B is the inverse of A, then A is also the inverse of B.
Theorem 1: (Uniqueness of inverse) Inverse of a square matrix, if it exists, is unique.
Proof: Let A = [aij] be a square matrix of order m. If possible, let B and C be two inverses of A. We shall show that B = C.
Since B is the inverse of A
AB = BA = I … (1)
Since C is also the inverse of A
AC = CA = I … (2)
Thus, B = BI = B (AC) = (BA) C = IC = C
Theorem 2: If A and B are invertible matrices of the same order, then (AB)–1 = B–1A–1.
Proof: From the definition of inverse of a matrix, we have
(AB) (AB)–1 = 1
or A–1 (AB) (AB)–1 = A–1I (Pre multiplying both sides by A–1)
or (A–1 A) B (AB)–1 = A–1 (Since A–1 I = A–1)
or IB (AB)–1 = A–1
or B (AB)–1 = A–1
or B–1 B (AB)–1 = B–1 A–1
or I (AB)–1 = B–1 A–1
Hence (AB)–1 = B–1 A–1
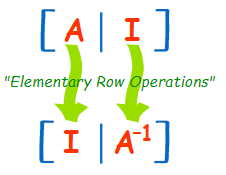
The inverse of a matrix by elementary operations
Let X, A and B be matrices of, the same order such that X = AB. In order to apply a sequence of elementary row operations on the matrix equation X = AB, we will apply these row operations simultaneously on X and on the first matrix A of the product AB on RHS.
Similarly, in order to apply a sequence of elementary column operations on the matrix equation X = AB, we will apply, these operations simultaneously on X and on the second matrix B of the product AB on RHS.
In view of the above discussion, we conclude that if A is a matrix such that A–1 exists, then to find A–1 using elementary row operations, write
A = IA and apply a sequence of row operation on A = IA till we get,
I = BA. The matrix B will be the inverse of A. Similarly, if we wish to find A–1 using column operations, then, write A = AI and apply a sequence of column operations on A = AI till we get, I = AB.
Remark In case, after applying one or more elementary row (column) operations on A = IA (A = AI), if we obtain all zeros in one or more rows of the matrix A on L.H.S., then A–1 does not exist.
Example:
Using elementary row transformations, find the inverse of each of the following matrices:

Source: Kapdec.com
Solution:
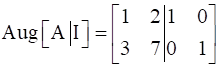
Let, A = 1237
Source: Kapdec.com
Now we are going to write the Augmented Matrix followed by matrix A and the Identity matrix I, i.e.,
Source: Kapdec.com
,
where I = 1001
Source: Kapdec.com
Now our job is to convert matrix A into Identity Matrix. Therefore, the matrix we will get converting the matrix I will be our A-1.

Source: Kapdec.com
Here, matrix A is converted into the Identity matrix. Therefore, we get the A-1 as,
A-1 = 7-2-3 1
Source: Kapdec.com
[Answer]
The value of A-1 is correct or not can be verified by the formula: AA-1 = I
Example:
Using elementary row transformations, find the inverse of each of the following matrices.

Source: Kapdec.com
Source: Kapdec.com
Solution:
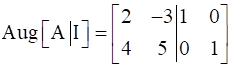
Let, A = 2-34 5
Source: Kapdec.com
Now we are going to write the Augmented Matrix followed by matrix A and the Identity matrix I, i.e.,
Source: Kapdec.com
,
where I = 1001
Source: Kapdec.com
Now our job is to convert the matrix A into the Identity Matrix. Therefore, the matrix we will get converting the matrix I will be our A-1.
Key Points
- Transformational matrices are used to represent and describe various transformations applied to graphical objects, such as points, vectors, or shapes.
- These matrices are typically square matrices, often 2×2 or 3×3, depending on the dimension of the object being transformed.
- Each element of the transformational matrix represents a specific aspect of the transformation, such as scaling, rotation, or translation.
- The elements in the last row of a 3×3 transformational matrix are usually fixed (0, 0, 1), which helps preserve the homogeneity of coordinates.
- The order in which transformations are applied matters. Multiplying transformational matrices in a specific order will yield different results.
- Transformational matrices can be multiplied together to combine multiple transformations into a single matrix.
- Applying a transformational matrix to a point or vector involves matrix multiplication.
- Translation matrices allow shifting an object by adding or subtracting constant values to the x and y coordinates.
- Rotation matrices enable rotating an object around a specific point or the origin by a given angle.
- Reflection matrices are used to mirror an object across a line or axis.
- Dilation matrices scale the object by multiplying the x and y coordinates by scaling factors.
- Different types of transformations can be combined by multiplying their corresponding transformational matrices.
- Inverse matrices of transformational matrices can be used to undo a transformation.
- Determinants of transformational matrices can be used to determine the orientation and scaling factor of the transformed object.
- The composition of transformations can be analyzed by chaining the corresponding transformational matrices together.
Scan to visit this resource online
https://kapdec.com/resources/transformational-matrix-on-a-graphical-object
